
Emergency Stops in Real-World Robotic Environments
January | February 2026
Why Emergency Stop Design Changes Outside Industrial Cells
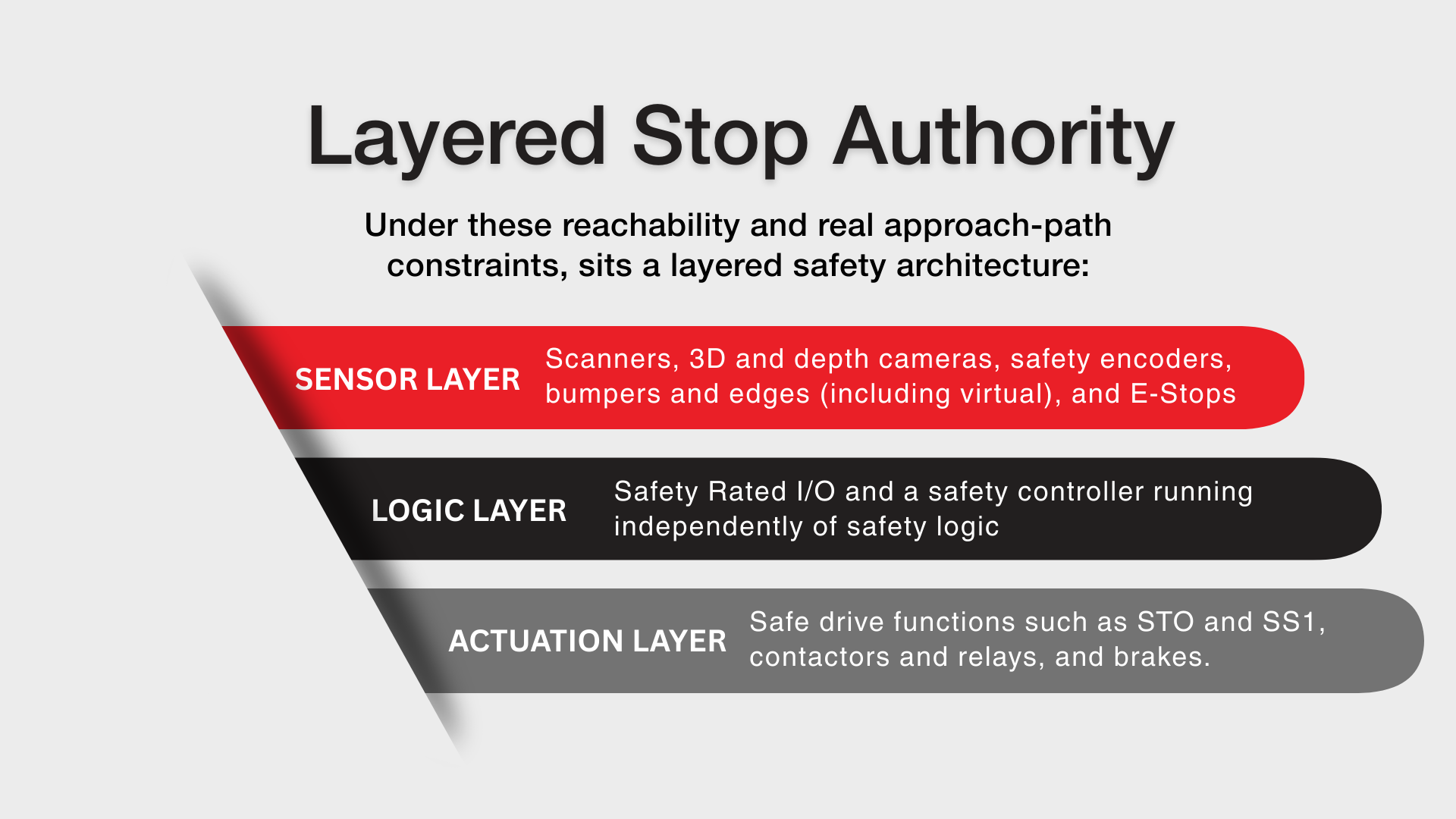
Robots operating outside traditional industrial cells require a different approach to emergency stop integration. In people-adjacent environments, the emergency stop button or E-Stop switch becomes the most visible safety control on thr robot interface. Stop authority must be immediate, hardware-level, visually clear, and physically accessible, with placement defined by risk assessment and real approach paths.
This page is designed to help engineers evaluate and specify emergency stop buttons and control interface components used in real-world robotic systems.
The same considerations apply to systems navigating shared spaces, assisting in care settings, operating alongside human workers, or supporting emerging humanoid interaction models. In these contexts, emergency stop access is a primary safety control, not a secondary or remote function.
This spotlight examines how NKK emergency stop solutions are designed into real-world robotic applications, including:
- Autonomous mobile robots used in warehousing and logistics
- Patient-facing collaborative robots in healthcare and wellness settings
- Autonomous vehicles used in transportation and agriculture
- Emerging humanoid platforms requiring refined, proportional interfaces
Across these use cases, the emergency stop button is specified early in the design process. Early specification allows engineers to balance safety requirements, interface clarity, enclosure constraints, and proportional integration as robotic platforms continue to shrink and evolve.
In many systems, the E-Stop is paired with complementary interface elements such as YB2 and UB2 illuminated pushbuttons, supporting clear state communication without compromising stop authority.
For a quick overview and video, visit our Emergency Stop Switches page.
Evaluate and specify E-Stops and control interface components for real-world robot HMIs:
Not sure which emergency stop button (E-Stop switch) or control interface is appropriate for your architecture? Contact an NKK applications engineer.

Autonomous mobile robots (AMRs) are no longer isolated machines; they are nodes in human-centric, software-orchestrated environments where AI, computer vision, and digital twins coordinate fleets alongside conveyors, lifts, and manual work. In that context, safety is a design requirement, and emergency stop button (E-Stop switch) placement is one of the clearest expressions of that intent.
Risk sets the pattern
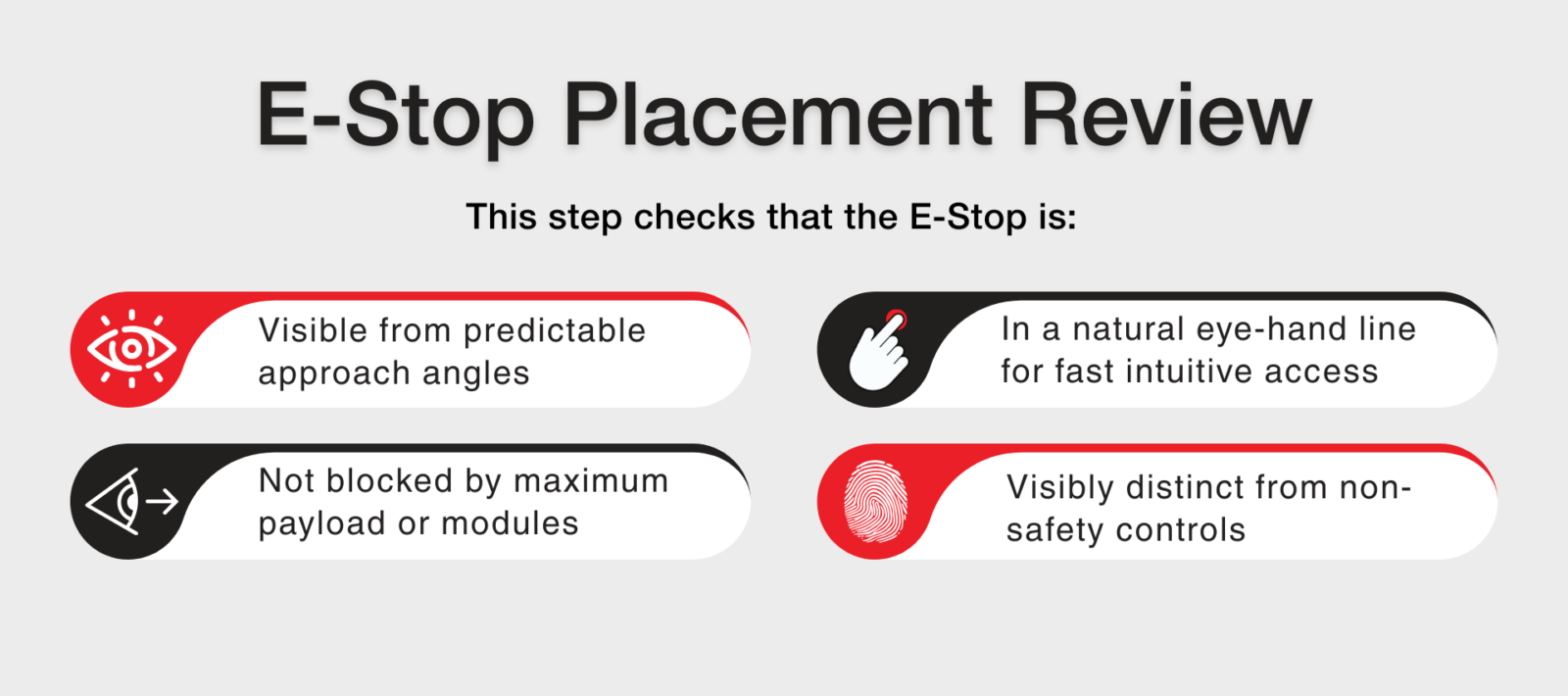
Current AMR guidance requires an E-Stop on each vehicle, but it does not define a universal layout. Placement is driven by vehicle geometry, approach paths, and application hazards. A risk assessment is the most reliable way to translate these variables into device count and location.
A simple rule of thumb
Many platforms follow a simple E-Stop pattern: low profile latching switches at opposite ends of the AMR. This geometry-based approach keeps a physical stop within arm’s length for people working alongside the robot. If someone must bend, reach across a load zone, or step into the AMR’s path to press the button, the placement likely needs revision.
See the Top 20 AMR Archetypes infographic for a quick snapshot of the market landscape, including several that feature NKK emergency stop buttons or E-Stop switches. Across this category, NKK is specified on platforms where teams prioritize safety interfaces.
Shock and vibration performance
AMRs live with constant vibration, impact risk, and shifting payloads, so that the E-Stop has to behave as a stable safety input. Rated for 10–500Hz vibration (amplitude 0.35mm, acceleration 50m/s²) and 1,000m/s² shock (150m/s² malfunction), NKK’s E-Stop supports mobile platforms where weakness in the safety chain is unacceptable.
Ready for dual channel safety
DPST normally closed contacts support dual channel safety, while the Ø 16mm body with 13.6mm behind panel depth fits recessed AMR sidewalls and other tight designs. NKK’s focus on quality and stable field performance makes our E-Stops deliberate safety-path choices.
For additional system-level context on designing autonomous mobile robots, including sensing, navigation, and hardware architecture considerations, see Qualcomm’s technical overview:
Autonomous Mobile Robots: What Do I Need to Know to Design One?


- Shock/vibration resistant construction supports continuous motion and impact loading in mobile platforms
- DPST NC contact configuration supports redundant stop circuits within a dual-channel safety architecture
- Achieves IP65/IP67 of IEC 60529 Standards (dust tight and protected from water jets in any direction and temporary immersion), at front panel
- Standard wire lead options are available
- One of the shortest behind panel depths in its class (.535″/13.6mm) facilitate high density panel layouts
View the specified E-Stop: FF0126BACAEA01
Emergency Stop Button Placement for Autonomous Mobile Robots

In patient facing cobots, local stop authority is a human-factors requirement at the point of service. Collision sensing, force limiting, and safety-rated stop functions reduce risk, but they do not eliminate the need for a direct, local E-Stop. Because the operator station is the care zone, the E-Stop button must live in that same visual and physical field, with zero search time and no dependence on a pendant.
Closed-loop force control
Patient-contact platforms are shifting from scripted motion to sensor-feedback, closed-loop contact control, where perception and force sensing continuously regulate interaction. As autonomy increases during physical interaction, emergency stop access must remain intuitive: obvious at a glance and immediately actionable.
Body mapping drives the session
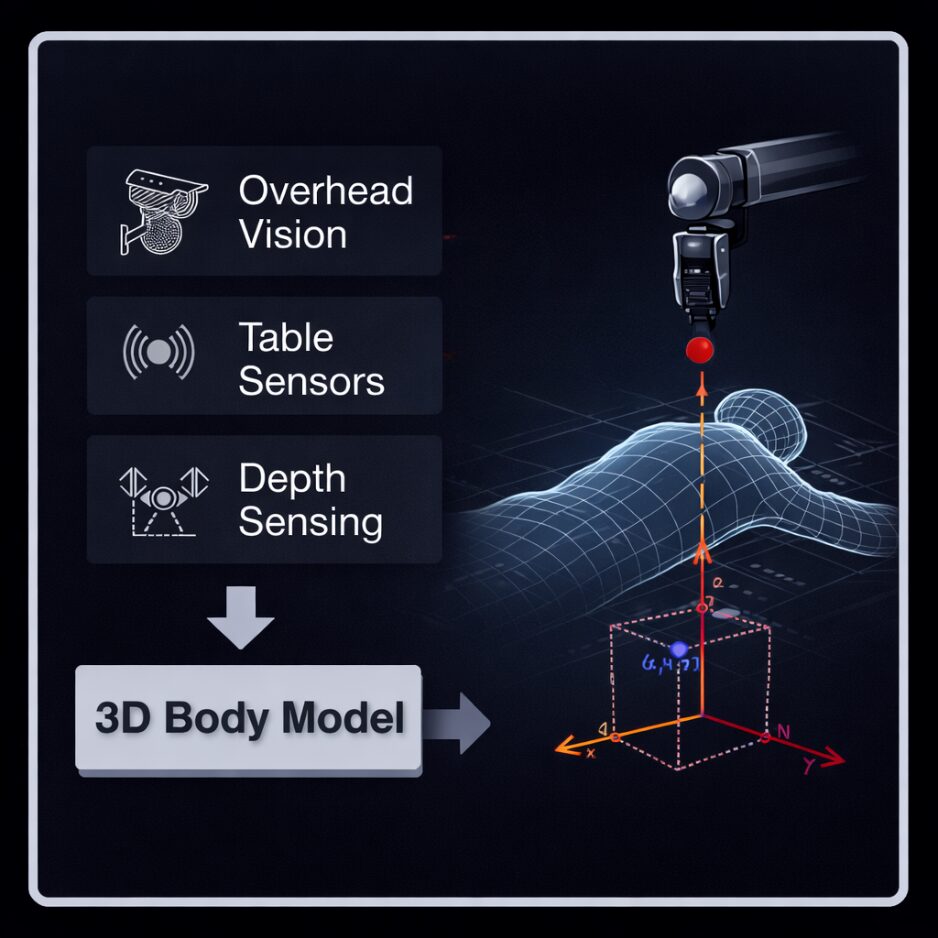
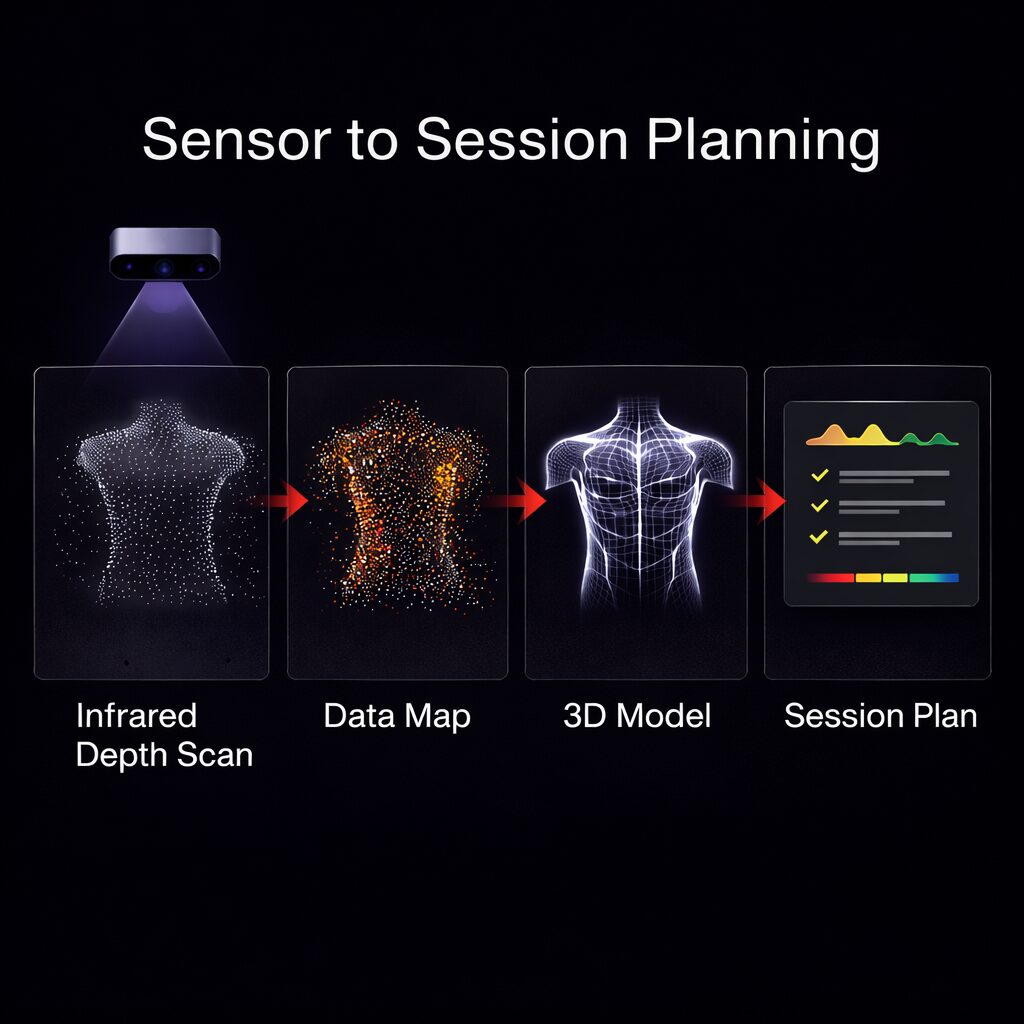
One robotics team has developed an on-demand, fully automated massage robot built around two cobot arms. Before each session, the system performs an overhead infrared body scan to generate a 3D model with over 1.1 million data points, which the platform uses to locate the body, identify target areas, and generate repeatable robotic stroke paths tailored to that individual.
At the point of care
Users control the session from a head-end touch screen, selecting a program and adjusting pressure in real time. The platform pairs 3D body mapping with user preferences to execute targeted contact paths, detects unexpected interaction to automatically disengage and reset, and uses AI and machine learning on saved profile history to refine personalization over time.
NKK’s no legend actuator and low profile emergency stop button design
Why the switch fits: The OEM required immediate, unambiguous stop authority at the head-end operator station without disturbing a minimal, calming interface. They specified NKK’s E-Stop with a Ø 25mm, no legend actuator, and the 13.6mm behind panel depth made integration feasible in a shallow enclosure. The actuator’s form and placement still read clearly as an emergency stop. The switch’s IP65 & IP67 ratings allow for environmental exposure associated with regular cleanings, accidental spills that are inevitable in commercial and medical settings.
| Patient-Contact Control Stack Shifts As physical interaction becomes more software-controlled, more decisions move into perception and control algorithms. Emergency stop authority must stay local, immediate and hardware-based.
|

- Ø 25mm actuator and short behind-panel depth fit cleanly in limited enclosure space at the head-end operator station.
- DPST configuration supports redundant stop circuits for stop authority and system monitoring.
- Shock resistant construction and sliding latch mechanism help mitigate vibration/contact chattering and mechanically maintain OFF state after actuation.
View the specified E-Stop: FF0116BACEEA01
Emergency Stop Button Placement for Collaborative Robots
Public-road automated driving systems (ADS) testing places humans and automated systems in the same operating envelope. With perception, planning, and motion executing live, intervention must remain immediate, deterministic, and independent of software state.
Road oversight and real-time logging
During supervised ADS testing and mapping of geofences, operators monitor perception and planning through a touch screen teach pendant. One person maintains situational awareness of the road environment while another logs behavior and anomalies in real time. A safety driver disengages when needed, and the engineer captures deviations from intended behavior. Each intervention is logged to improve system performance.
An emergency stop button or E-Stop on the teach pendant preserves immediate stop authority.
See the visual overview of robotaxi testing and safety validation process.
Testing data is safety evidence
NHTSA does not approve ADS testing in advance, but it does impose accountability through mandatory ADS crash reporting under Standing General Order 2021-01. Robust event logging and clear intervention markers are foundational to incident review and root-cause analysis. For additional context, NHTSA outlines this approach to automated driving system safety in its voluntary guidance for ADS development and testing.
FF01 Series: Designed for a pendant interface
One robotaxi developer specifies NKK’s FF01 Series E-Stop for a human-facing, touch screen test controller used during supervised ADS road testing and geofence mapping.
Limited panel space and shallow behind panel clearance made integration challenging, so the Ø 25mm actuator and short behind panel depth fit cleanly alongside the touch screen HMI.
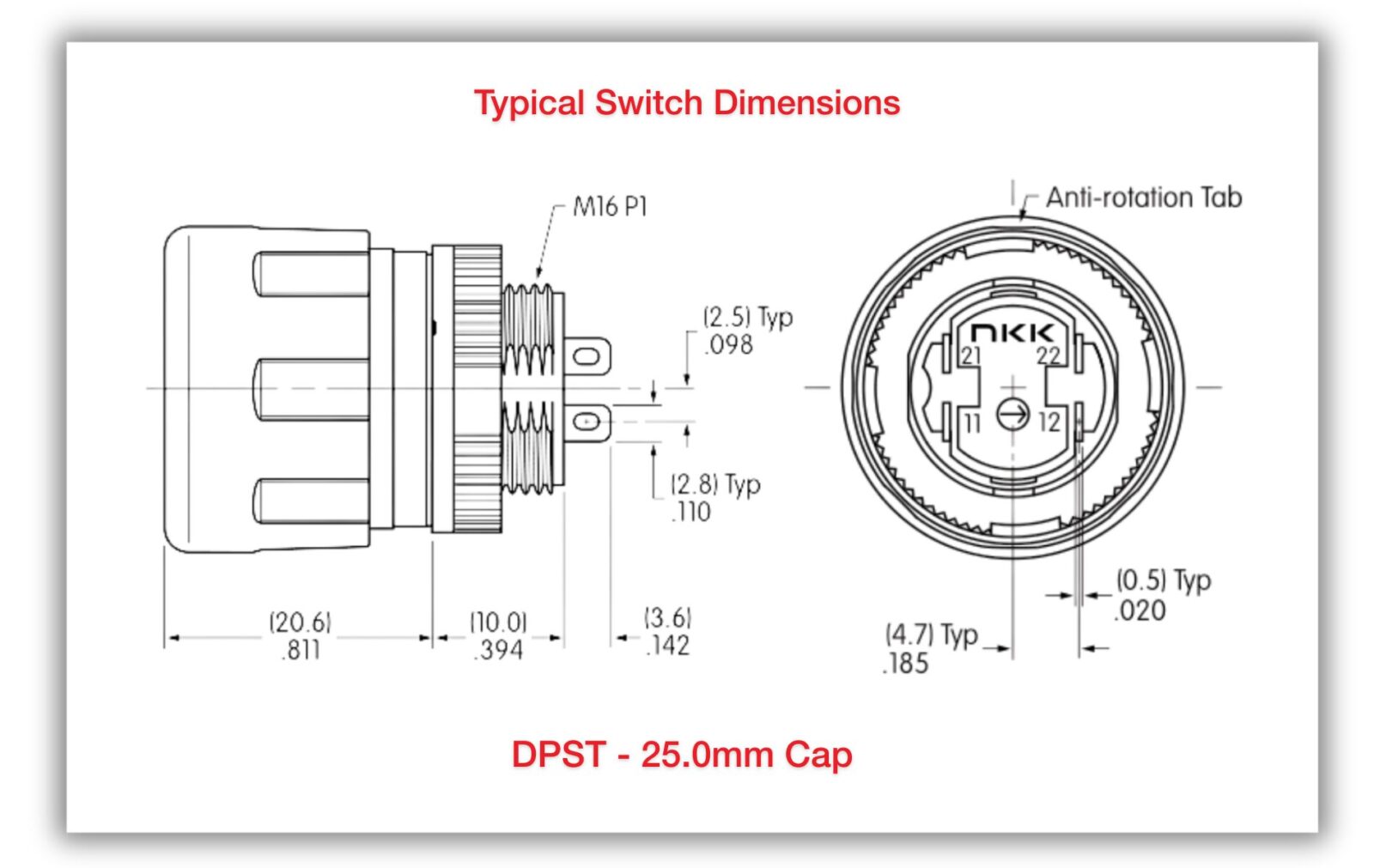
The switch is supplied with a custom pre-assembled, ready to install wire harness, and the DPST configuration provides redundant stop circuits for vehicle stop authority and system monitoring.
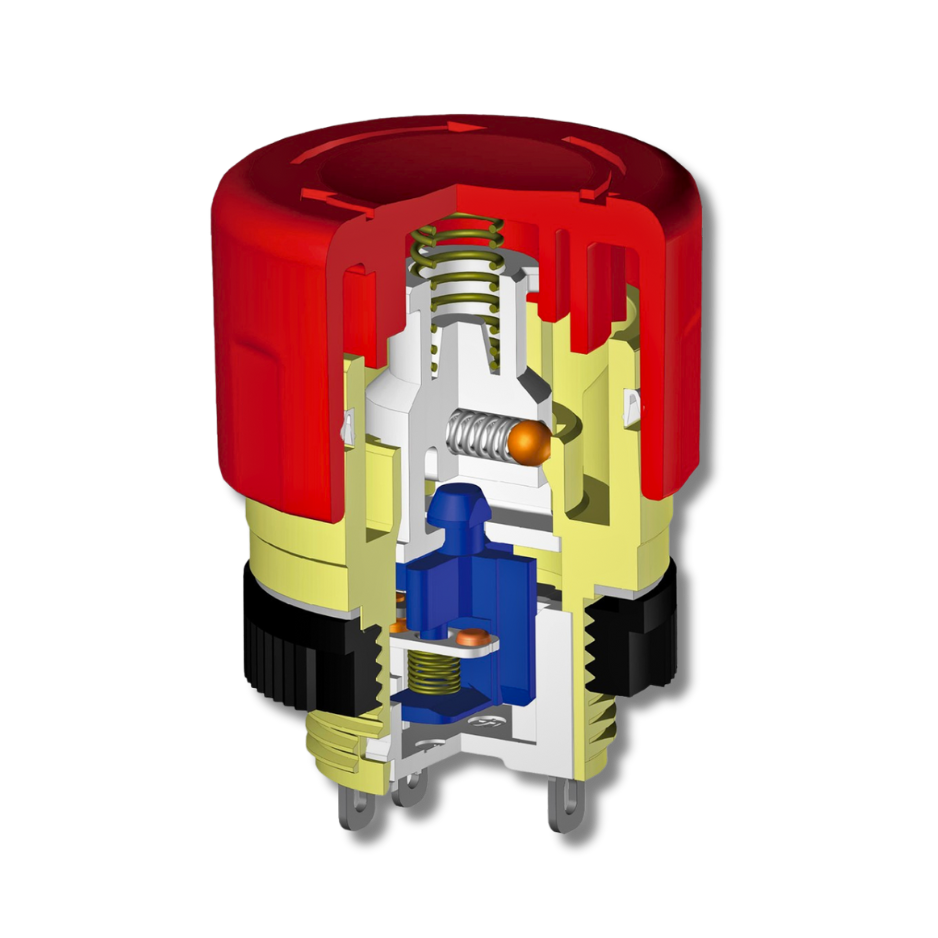
Shock resistant internal construction helps mitigate vibration and contact chattering, while a sliding latch mechanism mechanically maintains the contacts in the OFF state after actuation.


- Ø 25mm actuator and compact behind panel depth support integration adjacent to a touch screen within a handheld test controller.
- DPST normally closed contacts support redundant stop paths for intervention authority and system monitoring.
- Shock resistant construction and a sliding latch mechanism mechanically maintain the OFF state after actuation in vibration-exposed test environments.
- The OEM purchases the switch with a ready-to-install, prewired custom wire harness to simplify integration and reduce assembly handling at the controller.
View prewired and integration options.
View the specified E-Stop: FF0126BACAEA01
Emergency Stop Button Placement for Automated Driving System Teach Pendants




Designing in explicit authority without hazard signaling
Humanoid robots concentrate stored energy and actuation authority in a mobile, balance-critical platform. In homes, that capability sits within arm’s reach of untrained users. Interfaces must preserve safety authority and control integrity while avoiding cues that trigger fear, curiosity presses, or unintended state transitions.
Hidden until needed, opened by hand
That constraint shapes control access. Interfaces must stay accessible without broadcasting industrial hazard cues. A common pattern is a recessed interface behind a hand-opened hatch or flap. Closed, the exterior stays clean. Opened, it exposes a minimal set: an E-Stop switch and illuminated pushbuttons that signal intent to the controller rather than switching power directly. At the charging dock, passive indicators show charging, readiness, and lockout at a glance.
That objective also drives textile covers in modern humanoids, adding a layer over joints to reduce pinch exposure while softening industrial signaling at the exterior surface.


Intent inputs and stop authority
Humanoids separate user intent from energy application: a button press submits a request, the controller evaluates interlocks, posture, fault state, and energy availability, and only then executes a supervised transition, including charge enable at the dock. Illuminated pushbuttons and charging indicators support this model by providing controller-driven indication of approved state via independent lamp circuits, while the emergency stop button (E-Stop switch) remains the dedicated hardware-level device for immediate stop authority.

Illuminated panel seal pushbuttons
The YB2 Series is an IP65 rated, panel sealed illuminated pushbutton suited for intent-level inputs under controller supervision. Independent lamp circuits allow illumination to indicate approved state or lockout without tying visual feedback to actuator position. YB2 Series pushbuttons are offered with solder lug and quick-connect terminals for harnessed panel wiring. For PCB-based integration, an optional panel mount assembly allows the switch to insert into a PC adaptor, simplifying installation and maintenance.
Momentary and alternate action circuits support staged power-on requests and supervised transitions. Custom legends are available for transition readiness cues.

Illuminated pushbuttons with alternating legends
The UB2 Series illuminated pushbuttons with alternating legends and bicolor LED support dense HMI layouts where short behind panel depth and clear state cues matter. UB2 Series pushbuttons are available with solder lug for snap-in mount or straight PC terminals; the bicolor LED is externally driven, while the alternating legend changes mechanically with switch position.
Snap-acting contacts and an alternate action latchdown option deliver crisp tactile feedback, and the lamp circuit remains electrically isolated from the switching contacts.

Stop authority scaled for home-facing humanoids
Humanoids used in the home require an E-Stop that preserves immediate, hardware-level authority without a bulky, always-exposed control. Within the home scenario, the actuator scale is part of the safety design since public-facing robots cannot afford controls that visually dominate the panel or invite interaction. With a Ø 16mm body and 13.6mm behind panel depth, NKK’s E-Stop integrates into guarded access points yet stays unmistakable when exposed.

As humanoid platforms move closer to the home, interface design decisions carry more weight than ever. Our engineering team is available to support control architectures that balance safety authority with human-centered design.
View the specified E-Stop: FF0126BBCAEA01
Emergency Stop Button Placement for Humanoid Robots